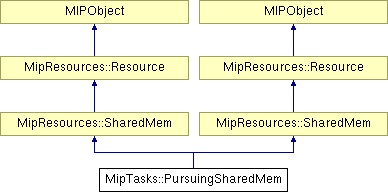
MipTasks::PursuingSharedMem Class Reference
[Pursuing]
Shared memory for the Pursuing task.
More...
#include <Pursuing.h>
Public Member Functions | |
| void | initSharedMem () |
| Initializing function for the EntrapmentSharedMem. | |
| PoseFeatures | getFormation () |
| Gets the formation as known from the robot. | |
| PoseFeatures | getEstimates () |
| Gets the estimates of other robots' fixed frames. | |
| bool | doAutoNavigation () |
| Gets the _doAutoNavigation bool. | |
| void | setAvoidMutLocIds (vector< int > &newIds) |
| Sets the vector of the ids of the robots to be escluded from the mutual localization. | |
| vector< int > | getAvoidMutLocIds () |
| Gets the ids of the robot that is not necessary to mutual localize. | |
| void | clearAvoidMutLocIds () |
| Clear the ids of the robot that is not necessary to mutual localize. | |
| void | initSharedMem () |
| Initializing function for the EntrapmentSharedMem. | |
| PoseFeatures | getFormation () |
| Gets the formation as known from the robot. | |
| PoseFeatures | getEstimates () |
| Gets the estimates of other robots' fixed frames. | |
| bool | doAutoNavigation () |
| Gets the _doAutoNavigation bool. | |
| void | setAvoidMutLocIds (vector< int > &newIds) |
| Sets the vector of the ids of the robots to be escluded from the mutual localization. | |
| vector< int > | getAvoidMutLocIds () |
| Gets the ids of the robot that is not necessary to mutual localize. | |
| void | clearAvoidMutLocIds () |
| Clear the ids of the robot that is not necessary to mutual localize. | |
Detailed Description
Shared memory for the Pursuing task.
Member Function Documentation
| void MipTasks::PursuingSharedMem::initSharedMem | ( | ) |
Initializing function for the EntrapmentSharedMem.
| PoseFeatures MipTasks::PursuingSharedMem::getFormation | ( | ) |
Gets the formation as known from the robot.
| PoseFeatures MipTasks::PursuingSharedMem::getEstimates | ( | ) |
Gets the estimates of other robots' fixed frames.
| bool MipTasks::PursuingSharedMem::doAutoNavigation | ( | ) |
Gets the _doAutoNavigation bool.
| void MipTasks::PursuingSharedMem::setAvoidMutLocIds | ( | vector< int > & | newIds | ) |
Sets the vector of the ids of the robots to be escluded from the mutual localization.
| vector< int > MipTasks::PursuingSharedMem::getAvoidMutLocIds | ( | ) |
Gets the ids of the robot that is not necessary to mutual localize.
- Returns:
- A vector containing the ids of the robot that is not necessary to mutual localize.
| void MipTasks::PursuingSharedMem::clearAvoidMutLocIds | ( | ) |
Clear the ids of the robot that is not necessary to mutual localize.
| void MipTasks::PursuingSharedMem::initSharedMem | ( | ) |
Initializing function for the EntrapmentSharedMem.
| PoseFeatures MipTasks::PursuingSharedMem::getFormation | ( | ) |
Gets the formation as known from the robot.
| PoseFeatures MipTasks::PursuingSharedMem::getEstimates | ( | ) |
Gets the estimates of other robots' fixed frames.
| bool MipTasks::PursuingSharedMem::doAutoNavigation | ( | ) |
Gets the _doAutoNavigation bool.
| void MipTasks::PursuingSharedMem::setAvoidMutLocIds | ( | vector< int > & | newIds | ) |
Sets the vector of the ids of the robots to be escluded from the mutual localization.
| vector<int> MipTasks::PursuingSharedMem::getAvoidMutLocIds | ( | ) |
Gets the ids of the robot that is not necessary to mutual localize.
- Returns:
- A vector containing the ids of the robot that is not necessary to mutual localize.
| void MipTasks::PursuingSharedMem::clearAvoidMutLocIds | ( | ) |
Clear the ids of the robot that is not necessary to mutual localize.
The documentation for this class was generated from the following files:
- tasks/Pursuing/pre_MutLoc/Pursuing.h
- tasks/Pursuing/Pursuing.h
- tasks/Pursuing/pre_MutLoc/Pursuing.cpp
- tasks/Pursuing/Pursuing.cpp